产品别名 |
现场动平衡测量仪,动平衡测量仪,VT800动平衡仪,风机平衡测量仪 |
面向地区 |
全国 |
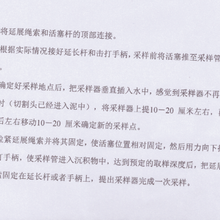
双面试重法动平衡测量
当转子的长度大于其转子的直径时,双面动平衡才能达到满意的效果。
按图6-15所示的方法连成系统。
将两个振动传感器分别水平吸在支撑转子的轴承座上,并且分别连接振动传感器的连线插入仪器面板上振动输入A口,B口中。靠近接入A口插座的振动传感器的校正平面为A面。靠近接入B口插座的振动传感器的校正平面为B面。由于仪器面板上振动输入插口A口在左边,B口在右边。所以一般认为转子校正平面,A校正平面在左边,B校正平面在右边。将反光纸贴在皮带轮或转子轴上。光电头对准反光纸1-30mm,(出厂调试距离为10cm左右)。并且光电传感器的连线插入仪器面板上光电输入插口中。通电后光电传感器上的发射管应该亮。
双面动平衡时,需要有两个校正平面和两个测试点。在其中一个校正平面加重时,需同时对两个测点的振动进行测量,即要考虑所谓交叉效应。
FFT 分析(频谱分析)
FFT 分析可以定性分析振动的频谱构成,进而确定振动的产生原因。FFT是针对近一次采样进行的。
⑴.在信号分析菜单图 6-51下,按◄或►键将光标移动到
其中,画面的左面是所要进行“FFT分析”的时域波形。
其中,X:游标处的横坐标值,表示采样点的时间先后次序。选择适当的 Arr值,按动◄或►键,就可以改变游标位置;
Y:表示横坐标为 X时的振动量,移动游标可读出各点振动量。
Arr:游标移动步距。即每次按动◄或►键时横坐标变化的点数。按动|+|键可以选择 Arr值为 1、10、100、1000。应选Arr值为10。
str: 将要进行“FFT分析”的时域波形的起点;
end:将要进行“FFT分析”的时域波形的终点。
⑵.移动游标到将要进行“FFT 分析”的时域波形段的起点,按▲键选定 str
⑶.移动游标到将要进行“FFT 分析”的时域波形段的终点,按▼键选定end。
三种转速传感器的比较
转速传感器有光电转速传感器,霍尔转速传感器,以及激光转速传感器(选购件)。
本仪器配套发货是光电转速传感器,光电转速传感器的优点是;测量转速时只贴一张白色双面胶反光纸,没有任何附加质量,简便易行。测量距离为1-30cm,基本上能满足现场测量的需要。缺点是:易受光线和距离的影响。有时要求反复要调节光电传感器上面白色的灵敏度旋钮。
霍尔传感器的优点是;输出脉冲好,抗干扰能力强,现场安装简单。对准配套小磁钢后,测量过程中不要做任何调整。缺点是:小磁钢本身有质量对测量精度有影响。小磁钢在高速旋转时会飞出来。如果平面上有孔;有槽;有飞沿,可用502胶水贴牢,工作转速小于1500转以下可以考虑采用。
激光转速传感器近新发展起来一种转速传感器,高转速可以测到60000转,适用于高速测量。其测试方法与光电转速传感器一样。比光电转速传感器抗干扰能力强,测量距离远,不需要做任何调整,读数稳定可靠。缺点是:需要用反光纸,反光标记要求高。反光纸与被测物体的颜色反差越大,测量结果越好。一般要求涂刷黑漆或粘贴黑色电工胶布等方式增加反差。激光转速传感器需要单购买。